医療機器医用材料部門インタフェースシステム学分野
会話情報学:センシング・AIに基づく人のインタラクションの理解
人は他者の性格や意図を表情、視線、しぐさなどから暗黙のうちに理解することで、他者との円滑なコミュニケーションを実現しています。
我々のグループではこのような人の意図や性格をセンサ情報・画像認識・AIなどを用いて計測、解析することで、人のコミュニケーションスキルを理解する研究を行っています。
またその結果を使って、人=人、人=ロボットのコミュニケーションを促進、円滑にする技術を開発しています。
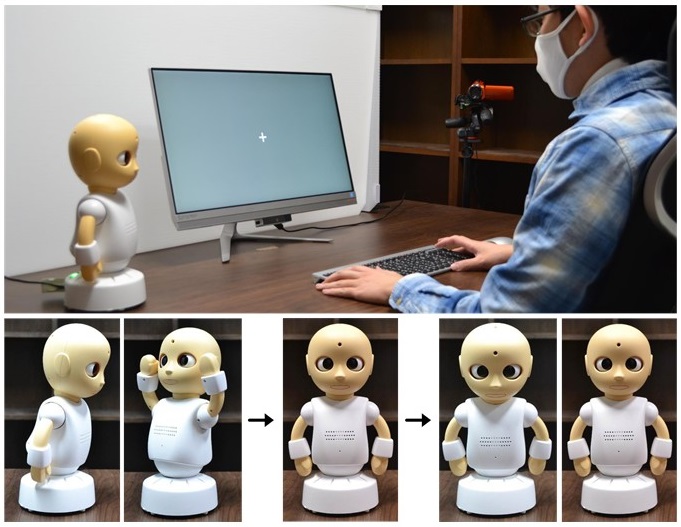
具体的には、人とソーシャルロボットとのインタラクション技術、優しい介護コミュニケーションの理解やスキル伝達技術の開発を行っています。
研究室データ
医療機器医用材料部門 インタフェースシステム学分野
教授 中澤 篤志
准教授 中谷 真太朗